2024 kaito’s
portfolio
WORKS
ROBOCUP


DIFFERENTIAL
SWERVE
DERVE UNIT
ROBOT HAND

ROBOTARM
“kaina”
ROBOCUP
2020 1月~ 2020 3月
about
18歳以下が参加できるロボカップジュニアサッカーライトウェイトという大会の全国大会向けに設計した機体。
二機体にそれぞれオフェンスとディフェンスの役割を与え、特化するような設計を行った。
consept
全国大会で勝てる機体
低重心、デザイン 機能性、
メンテナンス性の両立
tools
設計ソフト: Fusion
制御 : Arduino IDE Teensy3.6 OpenCV
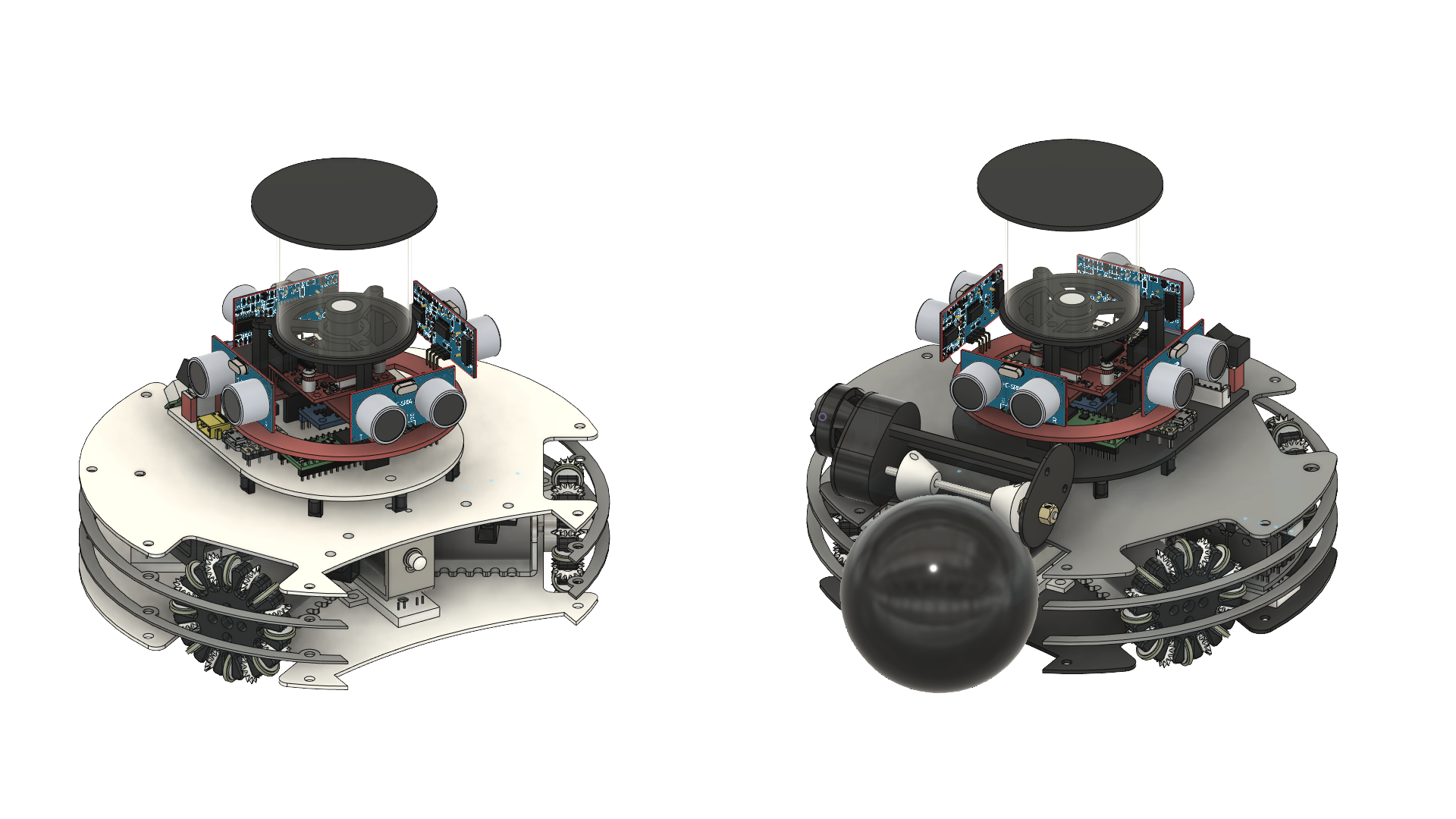
diffence
鉄壁の防御をコンセプトに設計した機体
双曲線の特性を利用した全方位カメラと超音波を用いた自己位置制御とキッカー機能を両立することを目指した機体。
offence
機体の重量制限が厳しい中、4輪オムニホイール、ソレノイドキッカー、ボールを保持するためのドリブラー、自作全方位ミラーを用いた全方位カメラ、4つの超音波センサーといった多くの機構を詰め込んだオフェンス機体
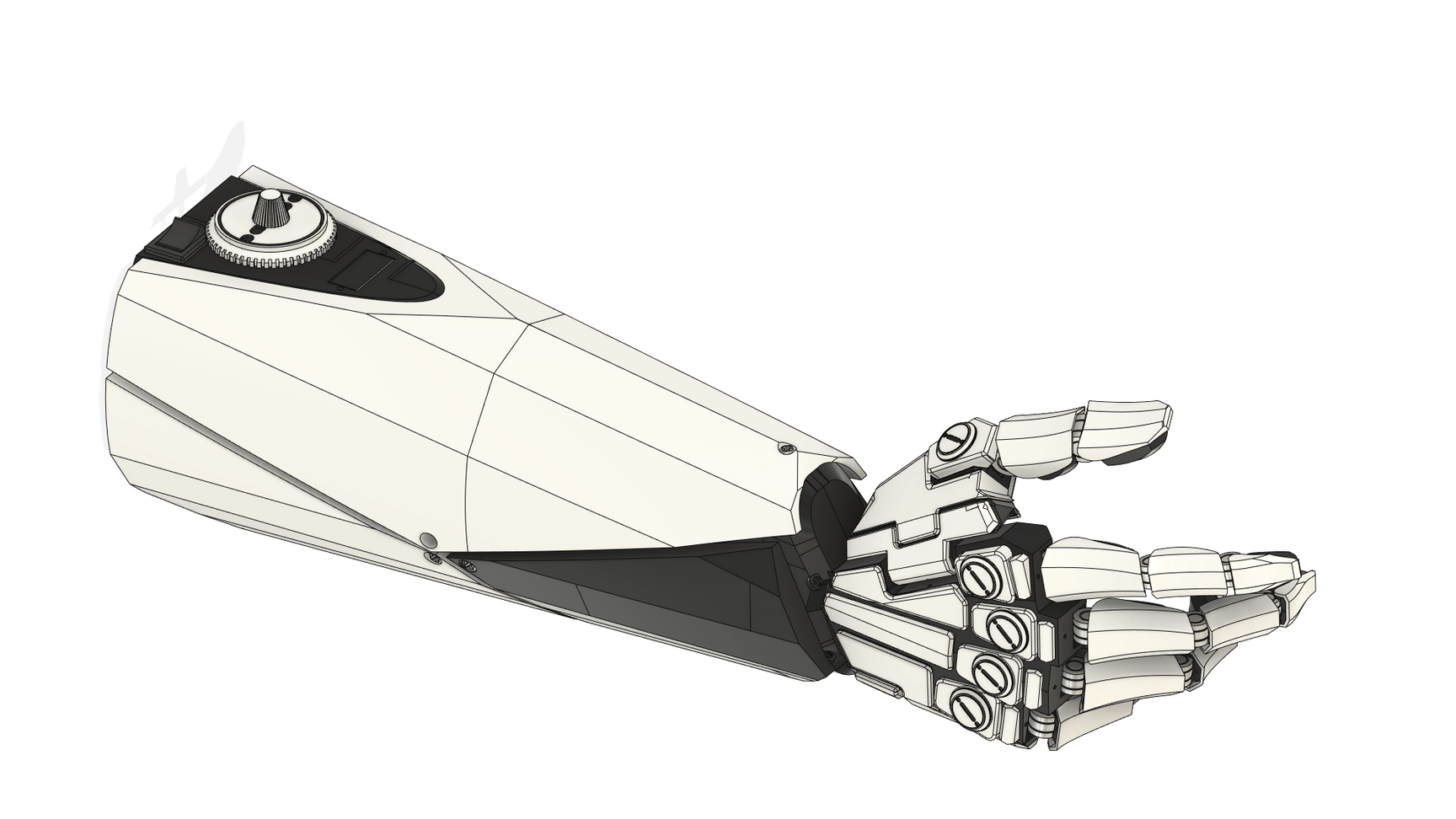
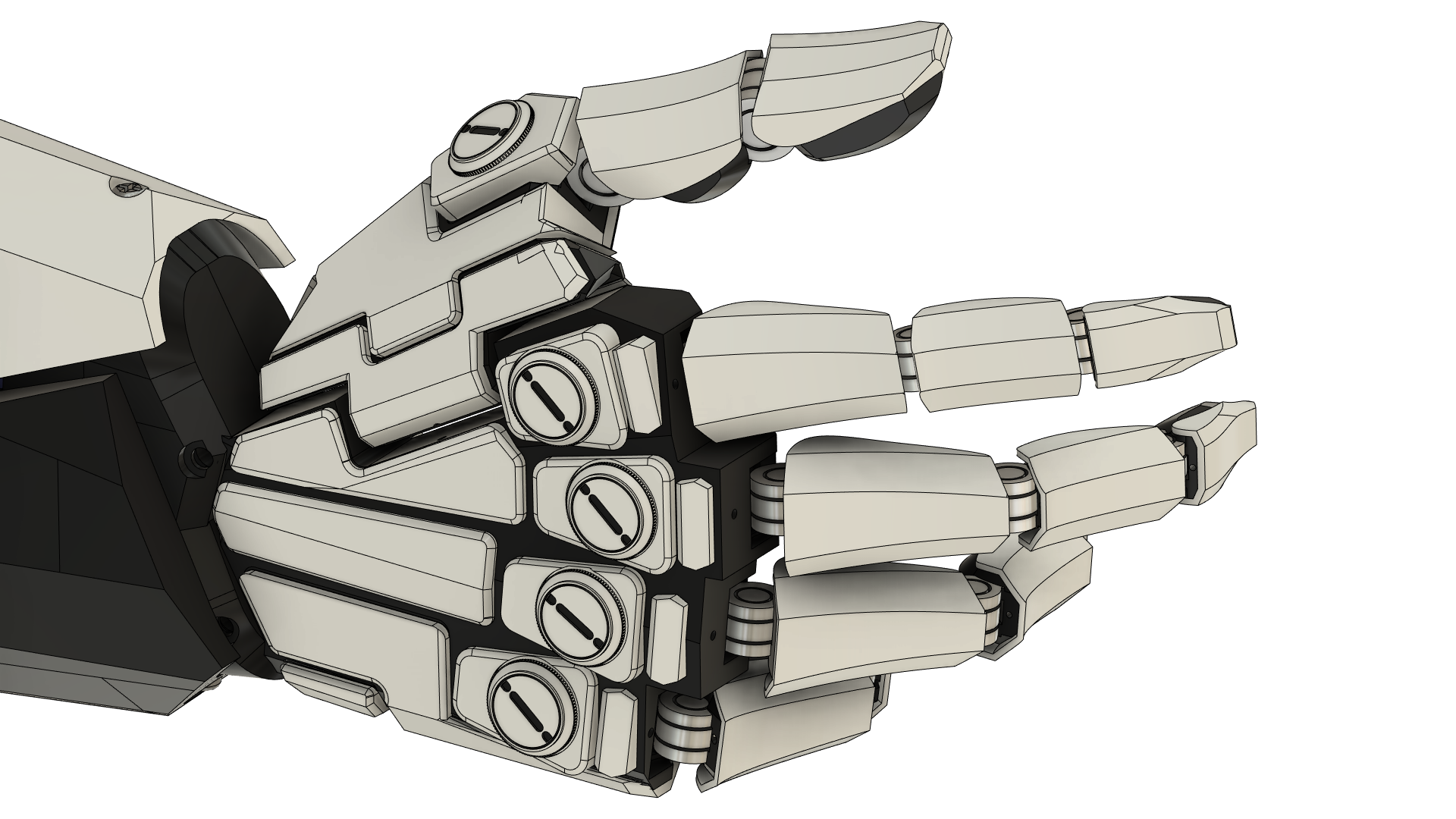
robot hand
2020 7月~ 2020 11月
about
ヒューマノイド作成の第一歩として高校生の時に作成したロボットハンド
デザイン、製作、プログラミングまでをすべて独学で行った。
consept
メンテナンス性のいいかっこいいロボットハンド
人間と同等レベルの速度で動作可能
有機的な曲線と機械的な角の融合
3Dプリンター部品を活用することで低コスト化
Interior design is as much about what you don't put inside a space as what you put in.
technology
ワイヤーアクチュエーターによって指の曲げを実現
指の角度測定には曲げセンサーを使用。
ロボットハンドとグローブ間の通信はBluetooth
どちらもバッテリー駆動にすることで、スタンドアロンでの動作可能
points
こだわったポイントは
- デザイン
- メンテナンス性
- 可動域
- 即応性
- 低コスト
tools
設計ソフト: Fusion
制御 : VScode platformio, XIAO ESP32C3
通信:Bluetooth
DIFFERENTIAL
SWERVE
DERVE UNIT
2023 10月~ 2024 2月
about
ロボコンのために開発した、二つのブラシレスモーターの速度によってタイヤの向きと速度を自在にコントロールできるユニット
差動機構を用いることで、稼働部品の削減と配線類を固定して故障率を減少できた。
おそらく世界初のタイヤを簡単に交換できるシステムを開発
consept
故障率が低く、メンテナンス性も高い移動ユニット
差動機構を活用したスワップシステムの搭載
3Dプリンター部品を活用することで低コスト化
points
差動機構によって、モーターの位置や配線が動くことなく、操舵と駆動を可能に。
スワップシステムによって、路面やタイヤの摩耗によってタイヤを変えることが容易に
spec
最大速度 秒速7.28m
最大加速度 0.8G(三輪、重量7.5㎏時)
総減速比 0.612
重量 1574g
タイヤユニット重量 553g
tools
設計ソフト: Fusion
制御 : VScode
ドライバー:ODrive
ROBOTarm
”KAINA"
2024 8月~ 2024 10月
about
ヒューマノイド作成への第二歩として開発したロボットアーム”KAINA"
人間と同じサイズと同じ自由度を持つ。遠隔操作時には、バイラテラル制御による力覚フィードバックでものを持った感覚をつたえることができる。
consept
人間と同等の大きさと自由度で動けるロボットアーム
軽くて速い
機能性と美観を両立したデザイン。
points
CAN通信によって、ノイズの多い環境であっても問題なく動作可能
軽量なアームに疑似ダイレクトドライブアクチュエーターを使用することでなめらかに人間のような速度で動作可能
5本指によって、より確実な把持や人間のような作業を可能に。
spec
自由度:5自由度+5自由度
駆動方式:腕:モーター直結
手:ワイヤーアクチュエーター
材料:カーボンファイバー配合ナイロン6
電源:18Vバッテリー
制御:ROS、CAN通信
重量:4.0kg(バッテリー含む)
ペイロード:500g
tools
設計ソフト: Fusion
制御 : VScode platformio, ROS 2, Teensy 4.1
回路設計:KiCAD
通信:CAN
PROFiLE

太田 開人
kaito ota
東京農工大学 工学部 機械システム工学科在学中
小さいころにアイアンマンを見て、ロボットエンジニアを志す。
現在は人間と同等のサイズと自由度と速度で動けるヒューマノイドを作ることが目標
Mail : kaito21017@gmail.com



CAREER
2018年 4月 埼玉県立川越高校入学
2019年 1月ロボカップジュニアサッカーライトウェイト全国大会出場決定
3月コロナ禍により、全国大会中止
2020年 11月ロボットハンドの作成
2021年 11月ロボットハンド完成
2022年 4月東京農工大学工学部機械システム工学科入学
2023年 6月NHKロボコン準優勝
10月マウザーアワードファイナリストに選出
2024年 6月NHKロボコン2024ベスト4
8月 ロボットアームKAINA設計開始
9月 KAINAプロトタイプ完成
9月キャチロボ エキシビションマッチ出場
10月 ConnectedRoboticsにてアルバイト開始


SKILL
プログラミング: C++, Python, Arduino IDE, MATLAB
モーター制御: DC/BLDCモーターの位置・速度制御、PIDチューニング
制御:PID カスケード バイラテラル
通信技術: CAN通信 RS485 TTL Bluetooth EtherCAT
設計技術: 人間工学に基づいたメカ設計、ワイヤー駆動メカニズム設計 エンジニアリング図面の作成
シミュレーション CADモデルの応力解析 URDFをGazeboで動作
プロジェクト管理: 小規模なチームを率いて設計から試作まで完遂
TOOL
設計ツール: Fusion
電子設計ツール: KiCad
制御プラットフォーム: Arduino, Teensy4.1, Raspberry Pi
ロボティクスソフトウェア: ROS2, Gazebo
プロトタイピング: SLA・FDM 3Dプリンター
action


自分で開発したロボットハンドの認知を広げるため、様々なイベントにロボットハンドを展示し、体験ができる場を設けている。ロボットハンドのデザインやその応答性、動き、握手した際の独特な感触などの感想を直接きくことができ、新たなアイデアやモチベーションを頂くことができた。